Fig. 32.1
Dual console da Vinci® SI robotic surgical system: the 3-D camera and instrument end-effectors can be controlled from either console. This is an ideal platform for both teaching and surgical assistance
Simulation and Virtual Reality
Thus far training modules have been physical entity-based by using plastic models, mannequins, live animals, and/or human cadavers [11]. Software-based virtual reality training systems are being developed in which everything is computer image driven [12]. Talented researchers are studying various iterations of automation. By combining preoperative multi-modality imaging with surface fiducials, representing internal fixed structures, researchers envision robotic systems that will automatically define a specific surgical task [13, 14]. Future automation will define simulated operative teaching as opposed to traditional clinical observations. Even the robotic “Achilles Heel” or lack of tactile feedback, it is being addressed actively through physical and electronic visual modalities [15]. By achieving a viable solution to this problem, an enormous impact on simulated teaching in robotic surgery will occur [16].
Intuitive Surgical engineers (Sunnyvale, Calif), working with Mimic Technology (Seattle, Washington) software staff, have developed a simulator “backpack”, called the da Vinci® skills simulator, that works well with the da Vinci® SI console (Fig. 32.2). The simulator “backpack” is portable and can be used with any daVinci® SI console. With this program a number of robotic tasks can challenge the learner, and a metric readout is displayed at the end of each exercise. The simulator is designed to train surgeons in overall system settings, camera control, instrument arm clutching, and fourth arm manipulation. Moreover, fine instrument maneuvers focus on needle passage, tissue dissection/deformation, cautery application, and positioning materials accurately within the surgical field (Fig. 32.3). Even for experienced surgical robot users, advanced skill exercises present a challenge.

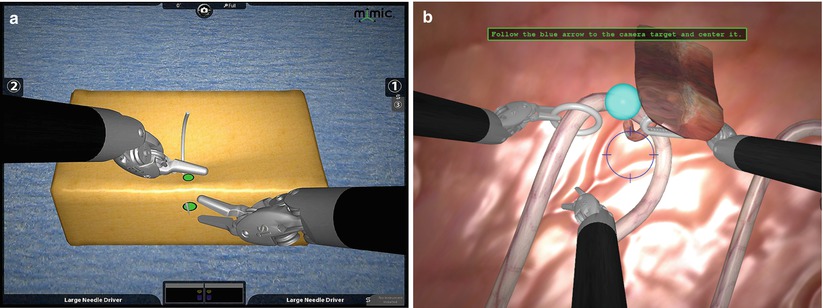
Fig. 32.2
A da Vinci® SI console is shown with the Skills Simulator “backpack” attached. The simulator provides both simple and complex surgical exercises with a metric read out
Fig. 32.3
The da Vinci® Skills Simulator presents a number of test surgical exercises to the learner. (a) Two robotic instruments are manipulating a ring over a solid rod (“blood vessel”) with the goal not to touch the rod. At the same time the fourth arm instrument is retracting an object (“tissue”) to allow passage of the ring. This exercise focuses on skills associated with fine tissue manipulation as well as system clutching between instruments. (b) Fine needle manipulation is being simulated. The goal is to pass the needle precisely through the tissue at a specific site with the correct trajectory. Note the tissue deformation as the needle passes
The new MIMIC dv-Trainer ™ robotic simulators give metric feedback with a score history to surgeons regarding ergonomic efficiency, operative speed, and surgical accuracy (Fig. 32.4). The trainer presents a number of scenarios for the learner and we believe that this type of simulation device will help bridge the gap in the use of robotics in cardiac surgery. Proficiency based metrics of graded operative skills seems to be the best way to train nascent robotic surgeons. This type of robotic simulation portends to become the standard for evaluating competency skills, premonitory to performing clinical robotic operations.
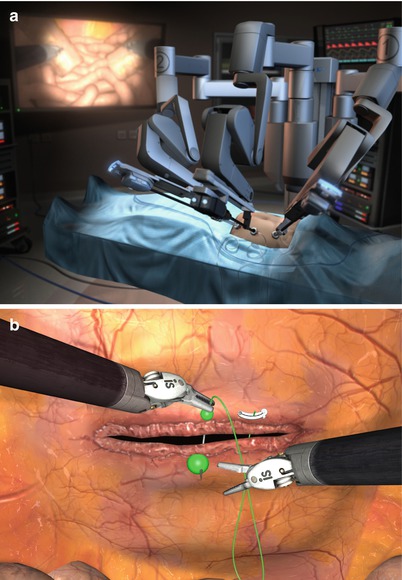
Fig. 32.4




This illustration shows the MIMIC robotic simulator. (a) Fine suturing movements are recorded and feedback is given to the operator. (b) This device provides feedback surgical feedback with store metrics that evaluate the progression of surgical expertise with surgical robotic tele-manipulation. Hopefully surgeons can track their competency learning curve. The advent of simulation centers will help to provide the best training for a large number of surgeons in a single specialty
Stay updated, free articles. Join our Telegram channel
Full access? Get Clinical Tree
