Fig. 28.1
Totally endoscopic coronary artery bypass grafting using endoscopic stabilizer without surgical robot
28.2 Patients’ Selection
From the viewpoint of coronary lesions, the patients who have significant stenosis or total occlusion in LAD are most ideal candidates for single-vessel TECAB. The patients with double- or triple-vessel disease in which LAD involved total or subtotal occlusion and non-LAD lesions are amenable to percutaneous coronary intervention (PCI) can become candidates for double-vessel TECAB or hybrid procedure consisting of TECAB and PCI. A robotic TECAB including internal mammary artery (IMA) harvesting and coronary anastomosis is performed with intrathoracic robotic forceps and needle folder through the instrument ports. Therefore, the patients with small thoracic cavity or small space between the heart and the sternum which causes interference of forceps are not suitable for this procedure. Moreover, the patients with severe lung disease enable prolonged single-lung ventilation, or the patients with stenosis of IMA or stenosis of ipsilateral subclavian artery are contraindicated. The patients with hemodynamic instability, acute coronary syndrome, huge left ventricle with aneurysm after myocardial infarction, and redo surgery are also contraindication for this procedure.
Because the TECAB is an operation to require innovative technologies and special operative skills, surgeons have to select the eligible patients very carefully.
28.3 Operative Procedure
All operations are performed under general anesthesia with double-lumen tube intubation for single-lung ventilation. External defibrillator patches are placed on the chest preoperatively.
28.3.1 Patients’ Position
In the case of using LIMA or both IMAs, the patients are placed in the supine position with the left chest slightly elevated with the lower position of their left arms. When it is difficult to harvest a right IMA (RIMA) through the left thoracic cavity, the patients are placed in the supine position, and a RIMA is harvested through the right thoracic cavity using a surgical bed rotation toward an opposite side following the LIMA harvesting through the left side.
In some female patients, it is useful to put the breast medially by adhesive tapes to make it easy to insert forceps ports.
28.3.2 Port Placement
Optimal port configuration is very important to perform full-length IMA harvesting and consecutively anastomosis of LIMA to LAD without the stress of arm collisions. Preoperative enhanced three-dimensional computed tomography (3DCT) is very useful to know precise anatomical relations of the intercostal spaces, LIMA, and LAD.
Three about 1.0-cm incisions are made in the third, fifth, and seventh intercostal spaces to 1 or 2 cm medial on the anterior axillary line. The places of right and left instrument ports can be sifted medially to camera port in some cases. After deflation of the left lung, a camera port is inserted through the middle incision, and carbon dioxide insufflation is initialed to make a space between the sternum and heart. A 30-degree angle upward camera is inserted firstly to examine the thoracic cavity, and the left and the right instrument ports are inserted into the third and seventh intercostal spaces under endoscopic confirming. The da Vinci surgical cart is moved to the surgical bed and docked to the camera and the instrument arm ports (Fig. 28.2.).

Fig. 28.2
The camera and the instrument arm ports are docked to a cart of a da Vinci surgical system. Three ports of a camera and both instruments are inserted into the third, fifth, and seventh intercostal spaces
28.3.3 IMA Harvesting
Techniques of IMA harvesting with robotic instruments are desirable to cut small side branches using coagulation of low-energy cautery and larger branches using hemoclips in a totally skeletonized fashion. Harmonic scalpel has been used for IMA harvesting in the skeletonized fashion in Japan, however, is still not available in the da Vinci surgical system. It is also recommended not to grasp the IMA directly, because the grasp force of robotic forceps is strong unexpectedly. When enough working space is not obtained, the intrathoracic pressure can be as long as the hemodynamics of the patient is unaffected, and lifting up the sternum by an electrical sternum lifting system is also useful [14]. Thanks to the various techniques mentioned above and the enhanced freedom of forceps tips, the full-length IMA from the subclavian artery bifurcation can be harvested comparatively easily with shorter learning curve [5]. When bilateral IMA has to be harvested through the left thoracic cavity, it is better to harvest RIMA first before LIMA through the fat tissue between the sternum and pericardium, because the harvested LIMA nearby interferes the forceps manipulation of RIMA harvesting.
28.3.4 LIMA to LAD Anastomosis
28.3.4.1 Beating Heart TECAB
After sysytemic heparinization to achieve an activated clotting time of more than 300 s, the pericardium is opened and the LAD is exposed. After setting of an operation field is completed, a stabilizer port is inserted in the subcostal region with endoscopic guidance. An EndoWrist stabilizer (Intuitive Surgical, Sunnyvale, CA, USA) mounted on the fourth arm of the da Vinci surgical system is used to fix an anastomotic region. This suction-type endostabilizer gives the console surgeon complete control while offering better exposure and stabilization, and these have led to highly complex endoscopic procedures such as triple and quadruple CABG on arrested and beating hearts. After the endostabilizer is placed just above on the anastomosis site of the LAD, the target coronary artery is dissected and occluded with two silastic saddle loops.
LIMA to LAD anastomosis techniques have two types: (1) intermittent sutures using S18 U-Clips (Medtronic, Minneapolis, MN, USA) and (2) running sutures using 7-0 polypropylene.
The intermittent suture technique with U-Clips was reported in details by Srivastava and colleagues [10]. This technique is as follows. The distal end of the IMA is partially transected leaving toe section attached, and five S18 U-Clips are passed outside-into the IMA in the far side (Fig. 28.3). The LIMA is completely dissected and led it to anastomotic site approximately. Previously placed five U-clips in LIMA are passed inside out sequentially in the far side of LAD, and the LIMA is parachuted down. Three additional U-clips are placed in the near side to complete the anastomosis (Fig. 28.4). Robotically achieved interrupted coronary anastomosis also reduces the possibility of purse-string continuous sutures with manageability and helps to overcome the lack of tactile feedback inherent with the da Vinci surgical system. However, U-clips are not universally available.

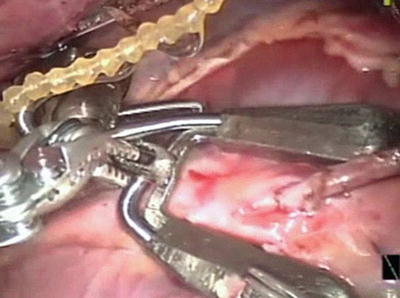
Fig. 28.3
The distal end of the IMA is partially transected leaving toe section attached, and five S18 U-Clips are passed outside-in to the LIMA in the far side
Fig. 28.4
A total of eight U-Clips are placed to complete the anastomosis using an EndoWrist stabilizer (Intuitive Surgical, Sunnyvale, CA, USA)
Another technique with running sutures using 7-0 polypropylene follows standard OPCAB techniques. However, the working space is limited in the TECAB; special needle and strings which Bonatti and colleagues reported may be useful [15]. After anastomosis and protamine administration, it is necessary to confirm all graft flows by transit-time Doppler assessment. Whenever all procedures of the TECAB are finished, surgeons have to check endoscopically the homeostasis of all camera and instrument ports. Bleeding from the ports is one cause of the revision for bleeding because intercostal artery or veins are injured by the force of robot arm.
For the safe and precise anastomosis in the beating heart TECAB procedure, it is very important to obtain bloodless standstill operation field. Moreover, a preparation of cardiopulmonary assist is also important for unexpected arrhythmia or hemodynamic instability.
28.3.4.2 Arrested Heart TECAB
Bonatti and colleagues preferentially applied arrested heart TECAB with cannulation of the femoral vessels, a balloon-tipped device (Cardiovations, Edwards Lifesciences Inc., Irvine, CA, USA, or Estech, San Ramon, CA, USA) for aortic endo-occlusion, and anastomosis of the coronary artery using running 7-0 polypropylene sutures [15]. Patient’s position and the ports’ setting for an endoscopic camera and instruments are almost the same as in the beating heart TECAB. When constructing running suture, two-point fixation technique of heel and toe may be favorable to prevent a thread from getting tangle. Moreover, surgeons have to perform enough hemostasis from an anastomotic region, because the bleeding from heel is difficult to control endoscopically after the anastomosis is finished.
28.3.4.3 Alternative Anastomotic Device
Balkhy et al. used coronary anastomotic connectors in beating heart TECAB [16]. The C-Port Flex-A distal anastomotic device (Cardica, Redwood City, CA, USA) was approved for use in the USA in 2005 after a multicenter European trial had shown >95 % vein graft patency at 6 months [17]. The C-Port device creates an end-to-side anastomosis using multiple interrupted stainless steel clips. The flexible shaft of the C-Port device allows its introduction through a port and facilitates a truly endoscopic approach to coronary bypass. They concluded that the C-Port device leads to a safe and reproducible robotic endoscopic single- and multivessel coronary bypass under the beating heart with excellent short-term and midterm outcomes. This device needs some techniques for loading; however, it can be an alternative anastomotic method in the future.
28.3.5 Multivessel Robotic Totally Endoscopic Coronary Bypass Grafting
With application of robotic technology, single-vessel coronary artery bypass grafting procedures of LIMA to LAD were performed and reported by many institutions with feasible outcomes. Further technical progress in robotic surgery has to make multivessel coronary artery bypass grafting procedures possible. Some pioneers of TECAB procedures reported more than 100 cases of multivessel robotic totally endoscopic coronary artery bypass grafting [15, 18]. In multivessel TECAB, basic operative setting including anesthesia, position of patients, ports’ placement, and preparation of cardiopulmonary bypass is the same as in single TECAB. The most important thing for the multivessel TECAB is to expose and stabilize the target coronary artery of either beating or arrested heart. An EndoWrist stabilizer mounted on the fourth arm of the da Vinci surgical system (available in da Vinci S or Si system) is very useful in this procedure. Bonatti and colleagues reported exposure techniques of the target coronary artery using this endostabilizer [19].
To perform multivessel TECAB, the use of both IMAs is indispensable, and Y-composite graft technique with LIMA and RIMA or sequential bypass technique is also required.
In the beating heart multivessel TECAB, the C-Port Flex-A distal anastomotic device mentioned above is available; however, another fifth port has to be created for the introduction and deployment of the device [17]. In any case, to perform multivessel TECAB, surgeons have to select patients very carefully from perioperative patient’s risks and coronary lesions and have to raise their skills by training.
28.4 Outcomes of Robotic Surgery
28.4.1 Intraoperative Outcomes
In comparison with standard OPCAB, TECAB procedure is accompanied with various complications. Intraoperative exclusion criteria of TECAB are (1) pleural adhesion, (2) intramyocardial left anterior descending artery (LAD), (3) inadequate working space, and (4) severely calcified LAD. The most common causes for exclusion in both beating heart TECAB and arrested heart TECAB were intramyocardial LAD and an inadequate working space. In the case of intramyocardial LAD, a small skin incision on the intercostals’ space has to be made to find out LAD. Using epicardial echo is available to find intramyocardial LAD. In some cases, operators mistake a diagonal branch for LAD. To avoid such a mistake, it is important to open the pericardium longitudinally from the pulmonary artery to the apex and to mark the target artery by a clip on the surrounding epicardial tissue. Inadequate working space limits a mobile range of robot forceps; therefore, TECAB procedure has to be converted to MIDCAB.
In beating heart TECAB, the most common causes for conversion to minithoracotomy are (1) injury of the LAD, (2) hemodynamic instability, (3) intolerance to single-lung ventilation, (4) bleeding from epicardium or anastomotic lesion, and (5) inadequate stabilization of the heart. On-pump beating anastomosis with cardiopulmonary support through femoral artery and vein is very safe and available in the case of hemodynamic instability. Authors experienced one conversion case of bleeding from epicardium which was caused by suction of heart stabilizer. A conversion rate was 4–24 % in the reported literatures [7–13].
On the other hand, majority of conversions in arrested heart TECAB are due to the difficulty with the cardiopulmonary bypass circuit including endoaortic balloon rupture or severe iliofemoral artery disease preventing guidewire placement.
28.4.2 Short-Term Outcomes
There are some reports about short-term outcomes over the past 10 years (Table 28.1). Incidence of conversion to larger thoracic incision, stroke, mortality, and myocardial infarction after operation were similar to both beating and arrested heart TECABs [7–13].
Table 28.1




Outcomes of TECAB with beating or arrested heart
Stay updated, free articles. Join our Telegram channel
Full access? Get Clinical Tree
